Multibeam Survey & ROV Inspections: RMS Lusitania Survey 2019

Dr Gerard Dooly
Centre for Robotics & Intelligent Systems, University of Limerick
Conservation of historically significant shipwreck sites is prohibitively expensive, particularly in water above 50m, resulting in in-situ preservation and recording being the preferred archaeological method. Non-destructive, high-definition 3D imaging is therefore essential for recording and managing submerged historical sites. Imaging systems used to inspect underwater heritage sites come a variety of forms of camera systems, sonar systems and laser imaging systems.
The RMS Lusitania was surveyed recently by the national seabed survey programme, INFOMAR, back in 2014, from a surface vessel utilising a multibeam echoscope (MBES) sonar, Kongsberg EM2040. This survey data can be visualised through an online portal:
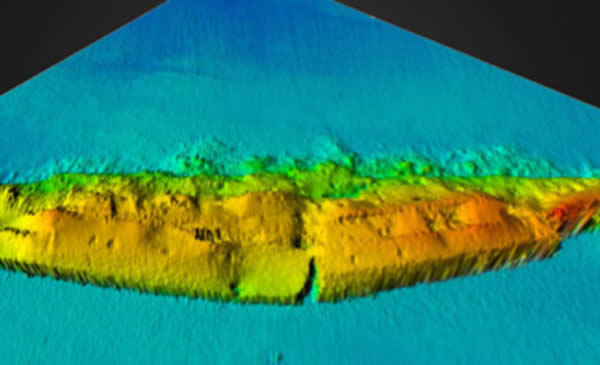
3D reconstruction of RMS Lusitania Site developed from INFOMAR dataset
However, as the wreck was surveyed from surface, resolutions achieved are somewhat low when compared to close quarter MBES inspections, SfM photogrammetry or Laser imaging. The proposed 2019 survey work looks to complete a close quarter MBES survey of the shipwreck site from an altitude of 10m. Optimal high definition imagery will be achieved through optimising accuracy of the inertial navigation systems (INS) onboard, minimising noise in ROV trajectory/stability, maximising data density, maximising pulse rate, narrowing the angular sector and using the highest frequency and shortest pulse lengths available. The aim is to complete between 4 to 7 overlapping centreline-parallel offset survey lines with additional perpendicular/oblique lines. We expect this survey to be achievable in the first day onsite over a 5-6hr period
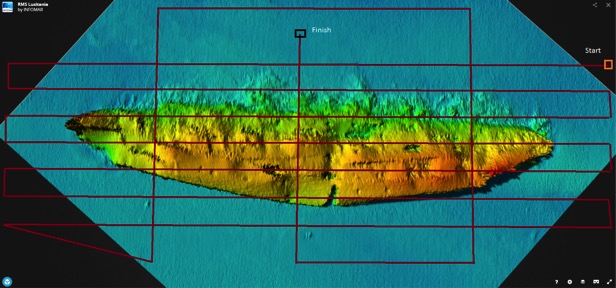 Line following plan for High Resolution ROV MBES survey
Line following plan for High Resolution ROV MBES survey
The MBES data will have a number of benefits including:
- High resolution MBES dataset of the shipwreck site providing (1) high-definition 3D imaging to benefit archaeological research (2) benefit development of effective mitigation strategies, if feasible, to minimise loss of the fragile underwater resource (3) raise public awareness of our shipwreck heritage
- Estimation
- Comparison to the INFOMAR data set of 2014 with possibility of providing an estimation of deterioration of the wreck site.
- A highly accurate baseline survey of the full shipwreck site for future comparison to determine rate of deterioration to the wreck site.
This MBES dataset is expected to be processed during the 2019 operation and can be subsequently utilised to complement other aspects of the ‘RMS Lusitania Survey 2019’ operation over the extent of the 2019 operations:
- MBES data will provide a base map for the SfM photogrammetry operations, possibly eliminating the need for any ground control points, offering ability to merge datasets and ultimately leading to higher detailed and textured photogrammetry data.
- MBES dataset will provide very accurate bathymetric and backscatter datasets which can be useful in the ‘structure and biodiversity survey’ which is to be completed by Newcastle University.
- MBES dataset will provide a base map for the ROV camera survey work, providing accurate GPS coordinates for the whole of the wreck site. This data can be used to plan close quarter camera survey and also provide exact GPS positions on feature/points of interest which may be visited by the ROV over the course of the Lusitania 2019 operations.
In addition to the MBES ROV survey, we also plan a survey of the wreck site using UHD cameras and laser systems at 1.5m altitude. This survey will however be completed at much slower transect speeds and will be significantly dependent on conditions on the wreck site itself. We cannot survey the wreck site without 4-5m+ visibility. This survey will contribute high resolution image datasets to the SfM photogrammetry project being carried out by Kari Hyttinen. The proposed survey plan is shown below; however, this is dependent on conditions and rate at which the work can be completed. The aim is to complete roughly 15 overlapping centreline-parallel survey lines offset by 4m. We expect this survey to be achievable in 5-6 days; however, this does not take in weather contingencies.
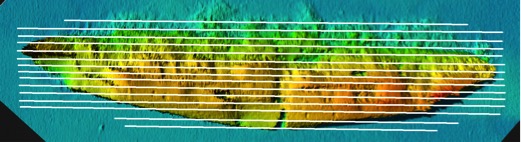
Line following plan for on wreck ROV survey
Platform and Infrastructure:
The Centre for Robotics & Intelligent Systems (CRIS) at UL have developed a small inspection vehicle, Áed, which is currently undergoing some upgrades to take the UL MBES unit. Once complete, the Áed ROV will be capable of carrying the MBES system, Coda Echoscope, and the Laser imaging system, ULS-500. Additionally, the Áed ROV, through the OceanRINGS control platform, has GPS co-ordinate frame navigation, which will allow the ROV to precisely go-to-GPS position.
 Inspection Class ROV System Áed
Inspection Class ROV System Áed
ROV Áed: Inspection class ROV, 500m tether, 150 kg WT (including payloads), Oceanrings control system, ROVINS Nano Inertial navigation system (with Nortek DVL, submersible GPS, SVS unit, LBL system), high thrust-to-weight ratio ROV. 2 X single mode fibre optic cables through umbilical to ROV (1055 mm length, 595 mm height, 650 mm width).
By current practice, ROVs are flown using camera (and sonar) feedback from scene to pilots for remote manual control with simple track-line displays. There is little automatic control other than auto-depth and station-keep with Doppler velocity log, and ROV operations are dependent on highly skilled pilots. Oceanrings control suite takes a different approach and utilises state-of-the-art subsea navigation equipment in semi-automated control algorithms to provide robust and more accurate control of the vehicle underwater. Effectively OceanRINGS provides full 3D DP control & navigation along with other features such as go-to-position. The control suite is particularly useful for survey inspections where accuracy in navigation is a critical component.

OceanRINGS Control & Navigation Suite